

NEWS CENTER
传感器的信号滤波方法:如何消除噪声,让输出波动小、更精准
发布时间:
2025-04-16
来源:
在智能家居、工业自动化、医疗设备等领域,传感器如同“感官神经”,实时捕捉温度、压力、运动等物理量。但你是否遇到过这样的问题:传感器数据忽高忽低,甚至出现明显错误?这背后往往是因为信号中混入了噪声。如何通过滤波技术“净化”信号,让输出更稳定?本文将系统解析传感器信号滤波的原理、方法及实战技巧,助你掌握这一核心技术。
一、为什么传感器信号需要滤波?
1. 噪声从何而来?
传感器信号在采集和传输过程中,会受多种干扰影响:
环境干扰:电磁辐射(如手机信号)、电源波动、温度变化。
机械干扰:振动、摩擦、冲击。
电路噪声:放大器热噪声、ADC量化误差、接触不良。
这些噪声会导致信号波形畸变,产生随机波动或尖峰。例如:
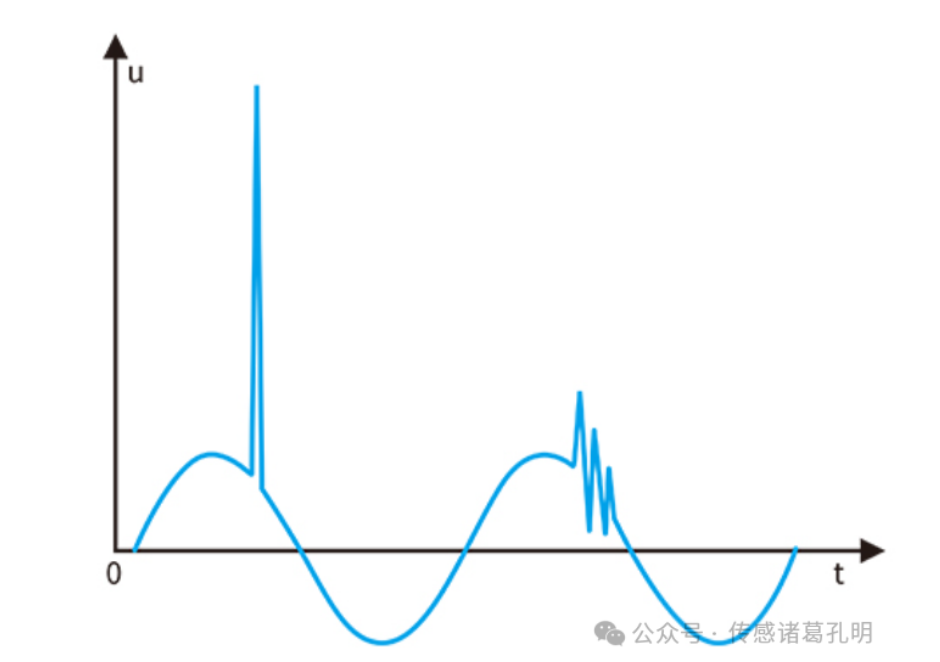
温度传感器在电机旁受电磁干扰,读数跳变±2℃。
加速度传感器因机械振动,输出信号中出现高频毛刺。
2. 滤波的核心目标
去伪存真:分离有用信号与噪声。
提升信噪比(SNR):让数据更接近真实值。
保障系统稳定性:避免噪声触发误动作(如误报警、控制指令错误)。
二、滤波原理:从“筛子”到“算法”
1. 滤波的本质
滤波的本质是根据信号与噪声的频率、幅值或统计特性差异,选择性衰减或阻断噪声成分。
以声音为例:
若噪声是高频嗡嗡声(如电流声),可通过低通滤波器“屏蔽”高频部分,保留人声。
若噪声是低频震动(如机器轰鸣),则用高通滤波器滤除低频干扰。
2. 频域与时域:两种分析视角

频域滤波:将信号转换为频率分量(傅里叶变换),在频谱上“切除”噪声频段。
时域滤波:直接处理时间序列数据,通过滑动平均、加权计算等方式平滑波形。
三、四大经典滤波器类型及适用场景
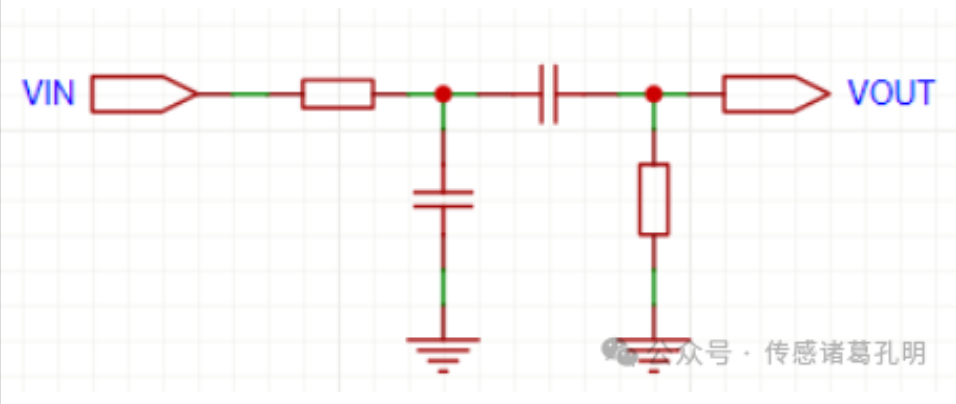
1. 低通滤波器(Low Pass Filter, LPF)
原理:允许低频信号通过,抑制高频成分。
实现(一阶RC低通滤波器):实际电路中用R和C就可以实现,下图是典型的低通滤波电路。

应用场景:
去除温度传感器的高频电磁噪声。
平滑心率传感器的脉冲信号。
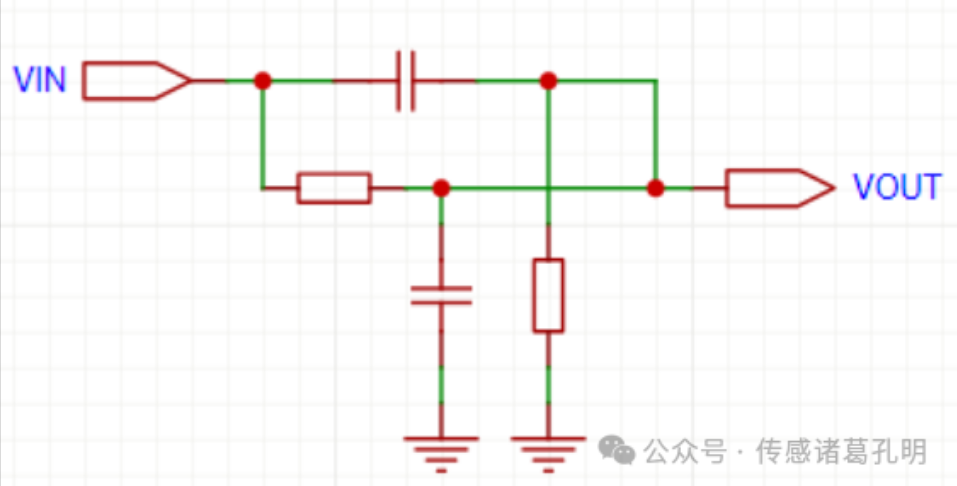
2. 高通滤波器(High Pass Filter, HPF)
原理:允许高频信号通过,抑制低频成分。
实现:可通过CR电路实现,C阻低频信号,下图是典型的高通滤波器。
应用场景:
消除加速度传感器的基线漂移(如重力干扰)。
提取语音信号中的辅音细节。
3. 带通滤波器(Band Pass Filter, BPF)
原理:仅保留特定频段信号。
实现:低通与高通滤波器的串联。
应用场景:
无线电通信中提取特定频道信号。
脑电波(EEG)中分离α波(8-13 Hz)或β波(14-30 Hz)。
4. 带阻滤波器(Band Stop Filter, BSF)
原理:阻断特定频段信号(如“陷波器”)。
实现:低通与高通滤波器的并联。
应用场景:
消除50/60 Hz工频干扰(如心电信号中的电源噪声)。
抑制特定频率的机械共振噪声。
四、数字滤波:从理论到代码实现
随着微处理器的普及,数字滤波已成为主流。其核心是将连续信号离散化,通过算法实时处理数据流。
1. 移动平均滤波(Moving Average Filter)
原理:取最近N个数据点的算术平均值。
代码示例(Python):

优缺点:
优点:计算简单,适合实时处理。
缺点:对阶跃信号响应滞后,无法抑制高频噪声。
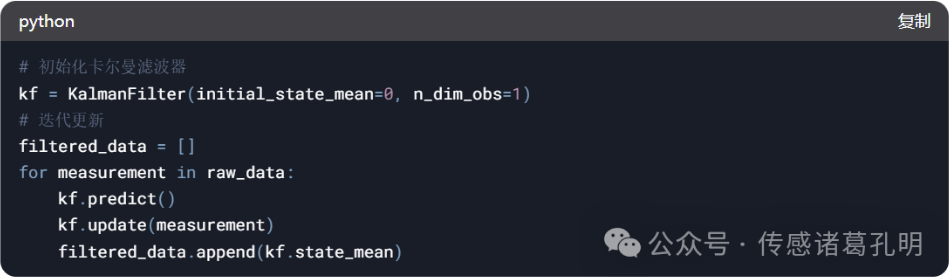
2. 卡尔曼滤波(Kalman Filter)
原理:基于状态空间模型,动态预测并修正信号。
适用场景:
无人机姿态传感器融合(加速度计+陀螺仪)。
GPS轨迹平滑。
代码框架:
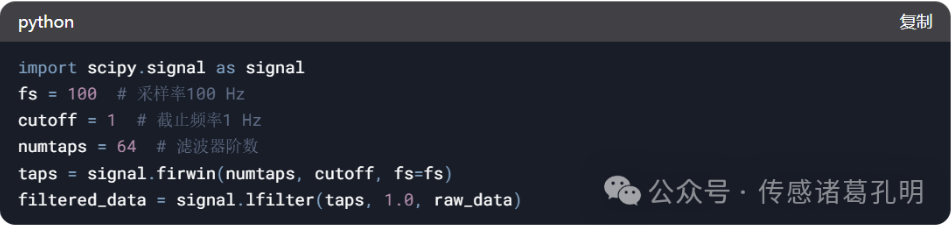
3. 有限冲激响应滤波器(FIR Filter)
原理:通过有限长度的加权系数对输入信号卷积。
设计工具:使用MATLAB fir1函数或Python scipy.signal.firwin。
示例:设计一个截止频率1 Hz的FIR低通滤波器:
4. 无限冲激响应滤波器(IIR Filter)
原理:利用反馈结构,实现更陡峭的频响曲线。
常见类型:巴特沃斯(Butterworth)、切比雪夫(Chebyshev)、椭圆(Elliptic)滤波器。
设计示例(Butterworth低通滤波器):
五、实战技巧:滤波参数如何选择?
1. 截止频率:不是越低越好!
确定方法:
分析信号频谱(FFT),找到有用信号的最高频率
2. 滤波器阶数:平衡性能与计算量
阶数越高,过渡带越陡峭,但计算延迟和资源消耗越大。
经验值:
移动平均:窗口长度5-20点。
IIR滤波器:4-8阶。
3. 零相位滤波:消除时移问题
方法:使用filtfilt函数(正反向滤波)。
代价:引入两端数据失真,需预留缓冲区间。
六、应用案例:滤波技术如何解决实际问题?
案例1:工业压力传感器噪声抑制
问题:液压系统压力信号受泵机振动干扰,波动范围±10%。
解决方案:
频谱分析发现噪声集中在50-100 Hz。
设计6阶IIR带阻滤波器,中心频率75 Hz,带宽30 Hz。
实时滤波后,波动范围降至±1%。
案例2:智能手环心率检测优化
问题:运动时肌电噪声导致心率误检。
解决方案:
心率信号主要成分为0.5-4 Hz(30-240 BPM)。
应用FIR带通滤波器(0.5-4 Hz),抑制高频噪声。
结合移动平均滤波,平滑输出波形。
七、滤波技术新趋势:AI与自适应滤波
1. 自适应滤波器(LMS/RLS算法)
原理:动态调整滤波器系数,追踪噪声变化。
应用:
降噪耳机实时消除环境噪声。
心电图(ECG)中消除呼吸干扰。
2. 深度学习滤波
方法:训练神经网络(如CNN、LSTM)直接从噪声数据中提取特征。
优势:可处理非平稳噪声和非线性干扰。
挑战:需要大量标注数据,计算资源要求高。
八、总结与建议
1. 滤波设计流程
Step 1:明确信号特征与噪声类型(频谱分析)。
Step 2:选择滤波器类型(LPF/HPF/IIR/FIR)。
Step 3:仿真验证(MATLAB/Python)。
Step 4:硬件实现(FPGA/嵌入式代码)。
2. 避坑指南
避免过度滤波:过度平滑可能导致信号细节丢失。
注意相位延迟:实时控制系统中,优先选择零相位或最小相位滤波。
定期校准:环境变化时,重新评估滤波器参数。
3. 工具推荐
仿真工具:MATLAB(Filter Design Toolbox)、Python(SciPy、PyTorch)。
硬件平台:Arduino(简易滤波)、STM32(实时IIR/FIR)、FPGA(高速处理)。
九、结语
传感器信号滤波既是科学,也是艺术。从经典的移动平均到前沿的AI滤波,技术的进步让我们能更精准地捕捉真实世界的数据。无论是工程师还是爱好者,掌握滤波技术都意味着拥有了一把“去伪存真”的钥匙。
本文转载自-传感诸葛孔明
关键词:
相关新闻
中国船级社西安分社完成对西安森瑟斯 ISO9001 质量体系二次监督审核!以质立企再获认可
近日,中国船级社西安分社审核组莅临西安森瑟斯传感器有限责任公司,顺利完成 ISO9001 质量管理体系第二次监督审核!这既是对公司质量管控工作的权威认可,更是持续精进的新起点

地址
西安市高新区毕原二路176号新一代人工智能产业园B6-401
在线留言